- 顧客:日本のオムロンロボットシステムインテグレーション企業
- 開発期間:約4日
(3Dスキャン、設計、テストを含む) - 製造方法:3Dプリント(高強度複合材料)
- 重量(吸着パッド・ボルト含む):117g
- 用途:デモンストレーション用途
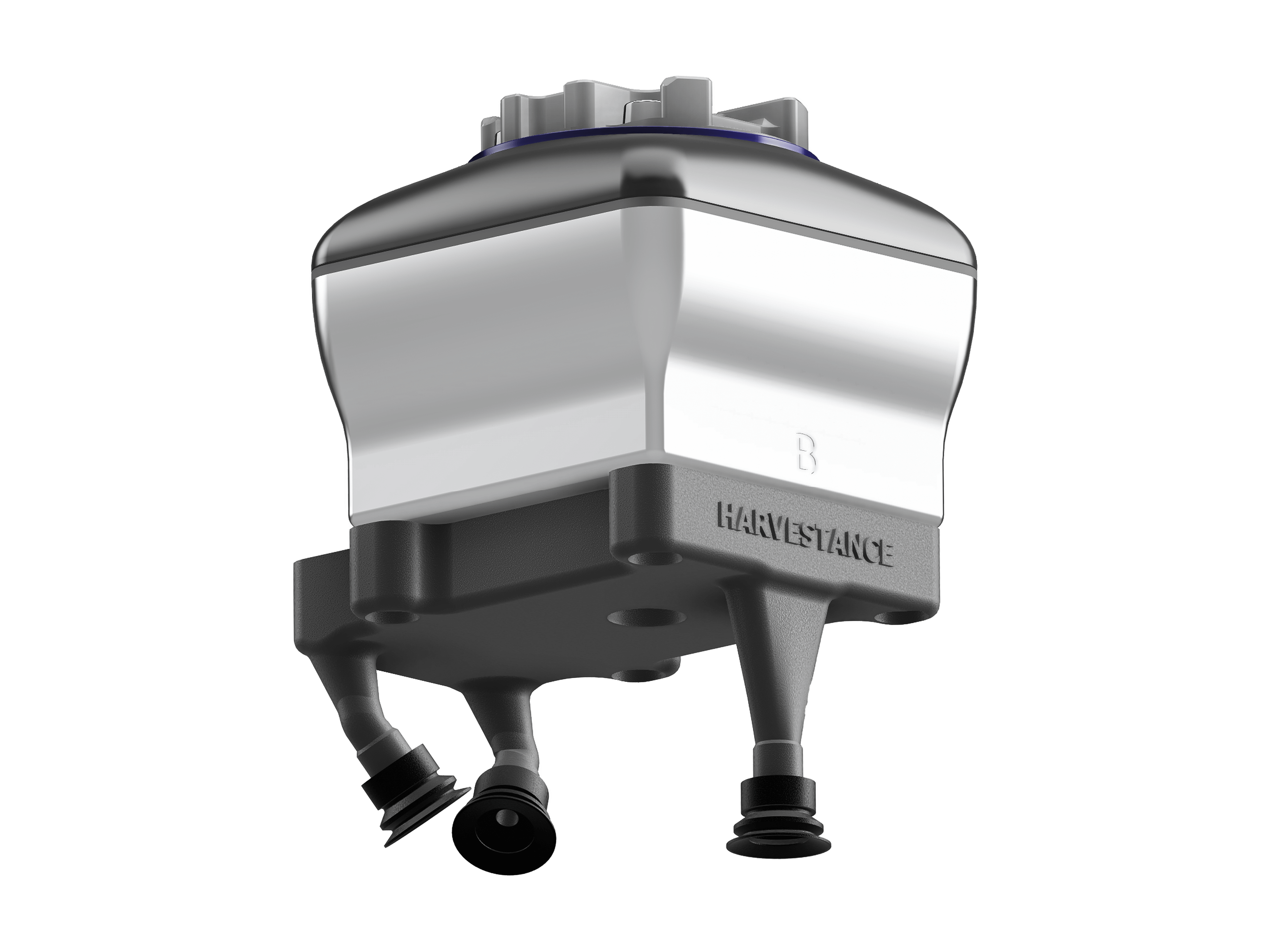
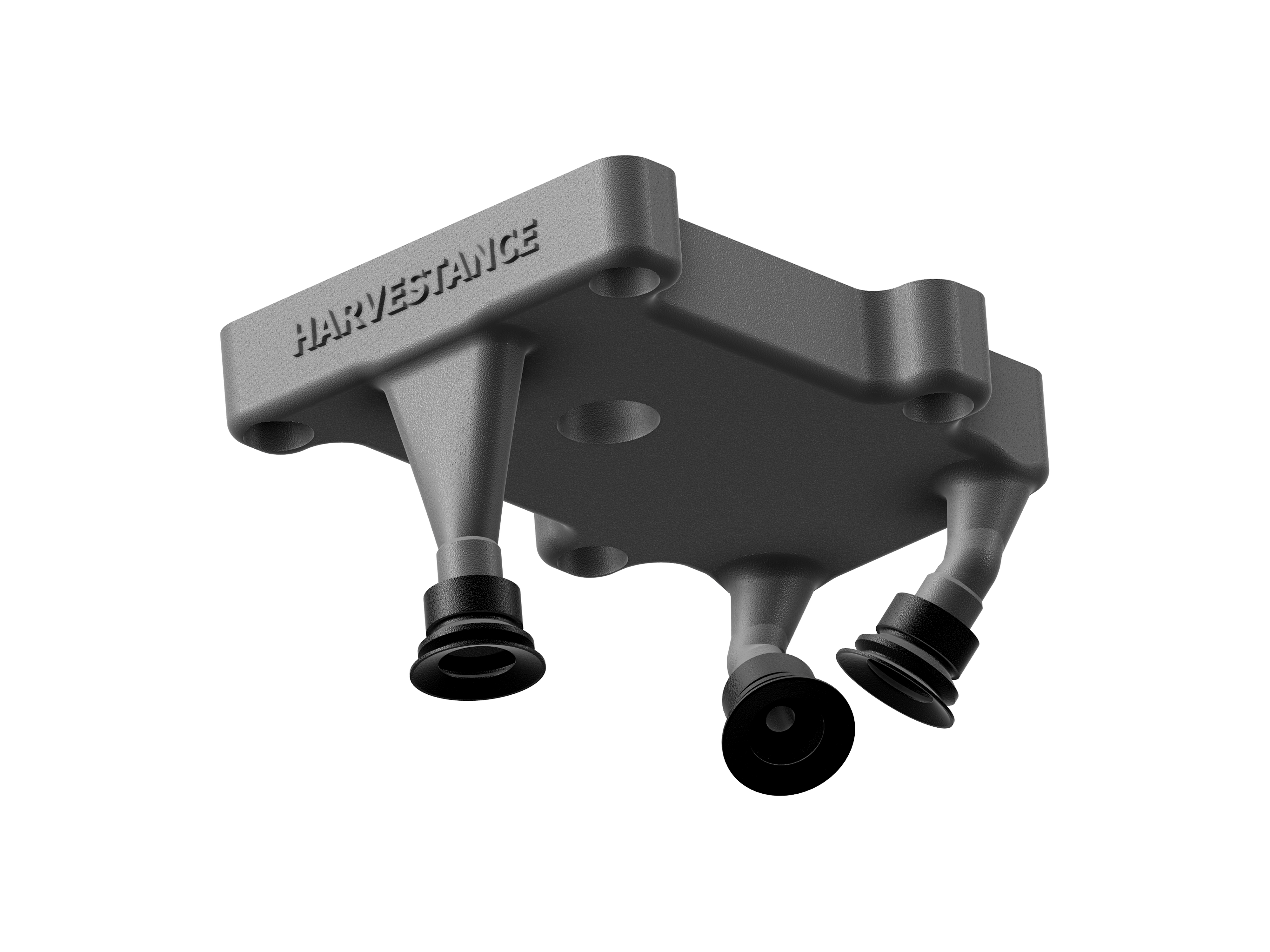
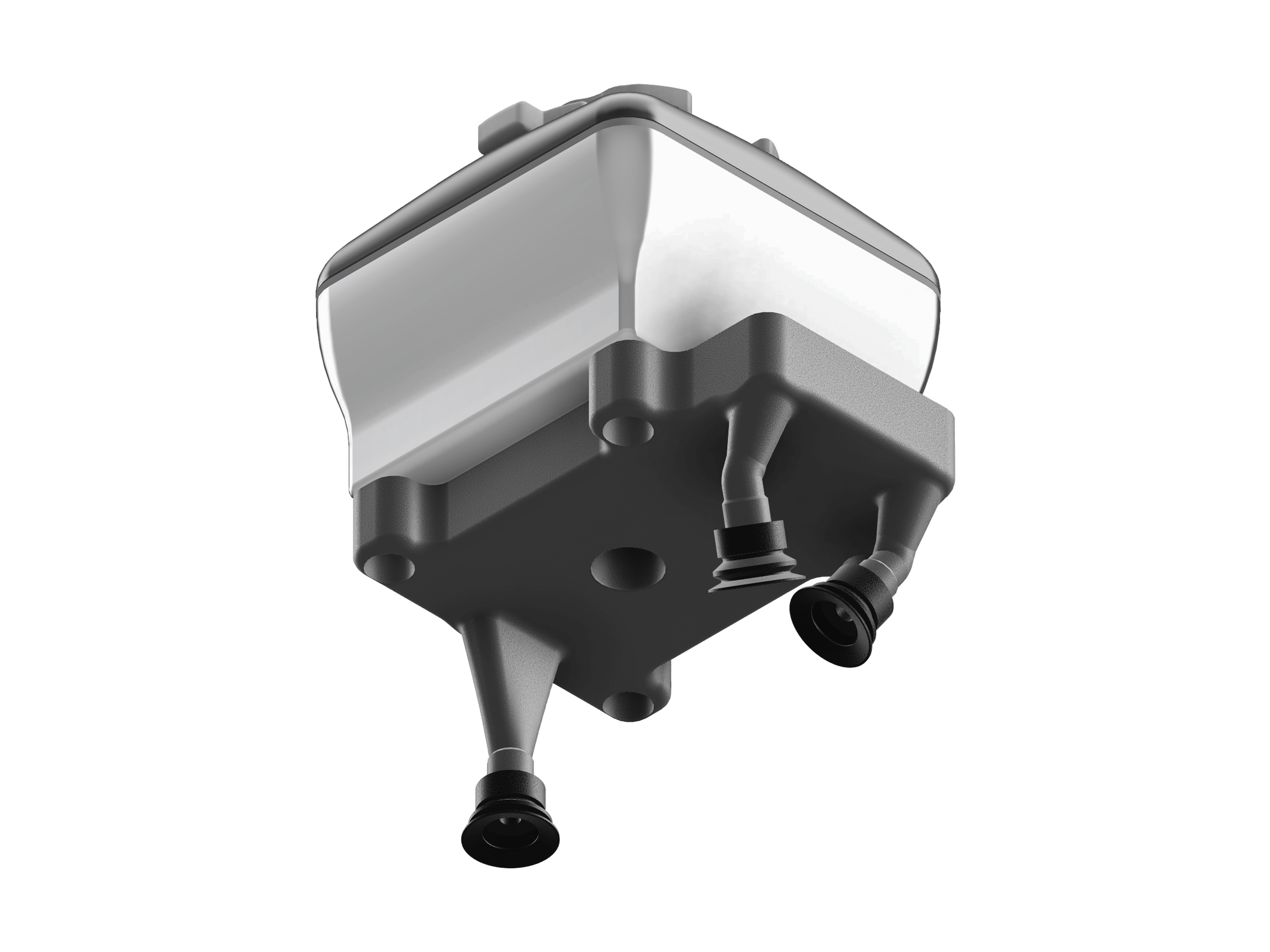
- シューツリーのような曲面形状のワークを安定してハンドリングできるよう、
吸着位置を考慮したカスタムグリッパーを設計しました。 - お客様が既に使用している真空ポンプ一体型グリッパーと互換性を持たせ、
既存グリッパーの下部にカスタムグリッパーを取り付けられるよう設計しました。 - ワンタッチ継手とバキュームチューブを接続して簡単に使用できるよう、
グリッパー内部にバキューム流路を内蔵しました。


%204-3.png)




%204-3.png)
%204-3.png)
%204-3.png)